Desde los inicios de la automoción lo normal ha sido que un solo eje reciba la fuerza del motor, bien con tracción delantera o con propulsión trasera. Posteriormente, la necesidad de circular con firmes resbaladizos dio lugar a los primeros diseños de tracción total, propulsión total o tracción integral. Los vehículos de cuatro ruedas de este tipo tienen cuatro ruedas motrices, ya sea de forma permanente (4×4) o parcial, es decir, solo cuando sea necesario, el resto del tiempo hablaríamos de un 4×2.
En la actualidad podemos encontrar sistemas de tracción total en turismos de cualquier tipo, ya sean orientados a circulación por carretera o para cualquier terreno, y hay distintas soluciones técnicas para conseguirlo. Los beneficios de la tracción total se pueden generalizar en que, en condiciones difíciles, se consigue mejor motricidad, pero también una mejor dosificación de la potencia para que un solo eje no la reciba en su totalidad. Contrariamente a lo que se cree, no mejora el paso por curva, pero sí la salida de la misma.
La configuración clásica de la tracción total es de un motor que entrega su fuerza a una caja de cambios, que envía la fuerza al eje trasero y también al delantero. El reparto de dicha fuerza se hace con el diferencial central -si el sistema es permanente-, que tiene que permitir distintas velocidades de rotación del eje delantero y trasero, a menos que este se bloquee y obligue a un reparto homogéneo. Además, el diferencial delantero y trasero permiten que las ruedas izquierdas y derechas giren a velocidades diferentes, salvo que estos también sean bloqueados.

Pérdida de tracción en el eje trasero
En modelos sin diferencial central los dos ejes giran a la misma velocidad por el diseño de la caja de transferencia, y solo debe usarse el modo 4×4 en condiciones difíciles y baja velocidad, en cualquier otro caso no. Esto no es un problema en los modelos con tracción total permanente, el reparto es variable y evita la problemática del reparto fijo.
Circulando en línea recta y con adherencia perfecta, suponiendo todas las ruedas del mismo tamaño, cada una girará a la misma velocidad angular, y el vehículo avanzará recto. A la hora de girar, las ruedas del lado exterior giran más rápido que las del lado interior, y en caso de patinazo, un eje puede girar más rápido que el otro. Estas diferencias son compensadas por los diferenciales delantero y/o trasero. El diferencial central hace lo mismo, pero a lo largo, no a lo ancho.
Entendido esto, los sistemas de tracción total siempre realizan un reparto de la fuerza entre ejes. En los modelos diseñados como trasera/total el eje trasero recibe más par motor, y al revés en los diseñados como delantera/total. Bajo determinadas circunstancias se puede obligar a un reparto igual (50/50), solo para superficies muy resbaladizas, o de lo contrario se estarían forzando los elementos mecánicos y desgastando los neumáticos. A esto se le suele llamar «4×4 Lock» o similar, se selecciona manualmente o como consecuencia de un programa de conducción offroad específico.
Con la llegada de los motores eléctricos a los híbridos y a los vehículos a baterías, ya no hay que pensar en una transmisión mecánica de la fuerza de impulsión ni en ejes. Por ejemplo, un sistema de tracción total con un motor en cada rueda desafía al diseño clásico. También puede ocurrir que un motor convencional y/o eléctrico esté en un eje, y un motor eléctrico en otro, y sin comunicación mecánica entre ellos (de esta forma, se ahorran muchos rozamientos y gasto inútil de energía).

En modelos eléctricos 4×4 como el Audi e-tron S Sportback no hay árbol de transmisión, solo cables
Los sistemas de tracción total pueden ser de gestión manual o automática. Normalmente, la gestión es totalmente automática en turismos de carretera, el conductor no ha de preocuparse por nada. El reparto se hará con un sistema mecánico o electrónico. Otros modelos incluyen una ruleta selectora o interruptor para alternar el modo 4×2, el modo 4×4 y, en algunos casos, el modo 4×4 con reductora y/o diferencial central bloqueado. Y en algunos todoterreno encontramos directamente dos palancas de cambio, una para la caja de cambios normal y otra para la caja reductora.
Hay que tener en cuenta que un sistema 4×4 siempre aumenta el consumo, se use o no. Esto se debe al aumento de peso inevitable por piezas adicionales, al consumo provocado por el diferencial adicional, y por el mero hecho de rodar por arrastre. Además, el incremento de precio del sistema 4×4, según el sistema utilizado, no baja de los 1.000 euros.
Lo importante en un sistema de tracción total es su principio de funcionamiento, no su denominación comercial. Bajo las denominaciones «AWD», «4×4» o «quattro» podemos estar ante sistemas completamente diferentes de una gama de vehículos a otra. En caso de cualquier duda hay que acudir al manual de instrucciones, de forma que sepamos las limitaciones del sistema 4×4, tanto lo que pueden como lo que no pueden hacer. Por último, no pierdas de vista que los diferenciales requieren mantenimiento específico a veces.
Ahora veamos qué tipos de sistemas de tracción total hay. Es importante conocer la diferencia, sus necesidades de mantenimiento, buenas y malas prácticas, o nos enfrentaremos a averías bastante caras:
Acoplamiento parcial
Exclusivo de los vehículos todoterreno, normalmente circulan en modo 4×2 entregando todo el par motor a un solo eje, que suele ser el trasero. En condiciones complicadas se puede engranar el eje delantero, a veces implica que se haga con el vehículo parado, y al no haber diferencial central el reparto se fuerza en una relación fija. Aunque es posible circular en carretera así, no es nada recomendable porque castiga neumáticos y toda la transmisión. Es fácil provocar una avería, incluso con lluvia abundante.
En algunos modelos el eje delantero se desacopla automáticamente a partir de cierta velocidad para evitar daños (sistema electromecánico), otros requieren parar para desengranar (sistema mecánico). Hay que tener en cuenta que mientras esté activo el modo 4×4 el radio de giro del vehículo se amplía (gira menos), incluso aparcando. En otras palabras, este sistema se usará prácticamente para circular sobre nieve, barro y condiciones similares, pero no para carretera.
-> Algunas denominaciones comerciales: Jeep Quadra-Trac o Command-Trac
Acoplamiento viscoso
Es un dispositivo mecánico que, en condiciones normales, no actuará porque el eje delantero y el trasero giran a la misma velocidad. En el caso de que el eje principal patine, se producirá una diferencia de rotación entre ejes. El viscoacoplador está relleno de un fluido viscoso como silicona o aceite, que al calentarse rápidamente por la fricción sobrevenida, se expande, provocando el acople del eje secundario. El efecto se deshace cuando los dos ejes vuelven a girar de forma solidaria.
En otras palabras, con este sistema la mayor parte del tiempo se conduce como un 4×2, y solo hay modo 4×4 puntualmente. Es simple, fiable y económico, aunque implica subir unas décimas el consumo en cualquier caso, y produce un mayor desgaste de neumáticos que se soluciona con permuta cada cierto kilometraje para no forzar el sistema viscoso a trabajar. Consulta el manual de instrucciones para mayor precisión. Una importante desventaja es que si una rueda no tiene adherencia se quedará patinando como loca y las otras tres no recibirán par, a menos que haya un control de tracción que la frene.
-> Algunas denominaciones comerciales: Suzuki AllGrip
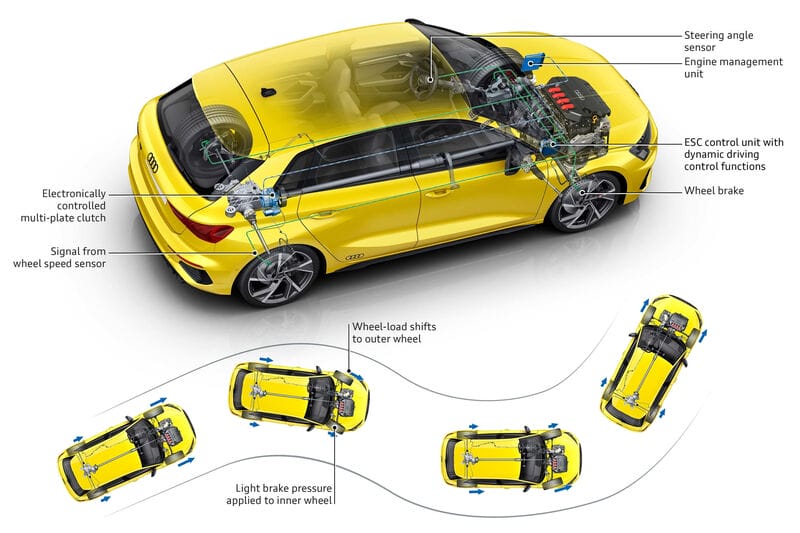
Sistema quattro de multiembragues Haldex con control de tracción inteligente (simula los diferenciales de deslizamiento limitado)
Acoplamiento electrónico por multiembragues y Haldex
Es un sistema de tracción total para vehículos diseñados como 4×2. Los sensores del ABS vigilan la velocidad de rotación de cada rueda. En el caso de que el eje principal tenga una pérdida de tracción, la electrónica mandará una señal eléctrica a un dispositivo de acoplamiento, que engranará unos embragues total o parcialmente y conectará el eje que antes permanecía pasivo. El reparto de fuerza que permite este sistema es variable. Frente al acoplamiento viscoso es un poco más complejo, más delicado, y tiene un mínimo tiempo de reacción, pero reduce el consumo de combustible.
Con este sistema se puede elegir circular en modo 4×4 en algunos modelos en cualquier circunstancia, y en el peor de los casos solo incrementará un poco el consumo de combustible, pero no perjudica a los neumáticos ni a la transmisión en sí. Otra cosa es que tenga sentido hacerlo.
-> Algunas denominaciones comerciales: Audi quattro, Saab XWD, SEAT 4Drive

Despiece de un diferencial Torsen
Sistema Torsen
Viene de torque sensitive, es decir, sensible al par motor. Se trata de un diferencial central que conecta permanentemente los dos ejes con un reparto prefijado (como 40/60). En su interior hay un sistema de engranajes helicoidales o planetarios que, en el caso de que un eje gire más que el otro, el diferencial le quita fuerza y la desvía al otro eje. Es un sistema mecánico y muy probado desde hace más de 40 años, de acción inmediata y muy eficaz, pero que provoca un mayor consumo de combustible. También es más caro y añade más peso, aunque no precisa ni multiembragues ni sistema de acople viscoso.
-> Algunas denominaciones comerciales: Alfa Romeo Q4, Audi quattro, Volkswagen 4MOTION…
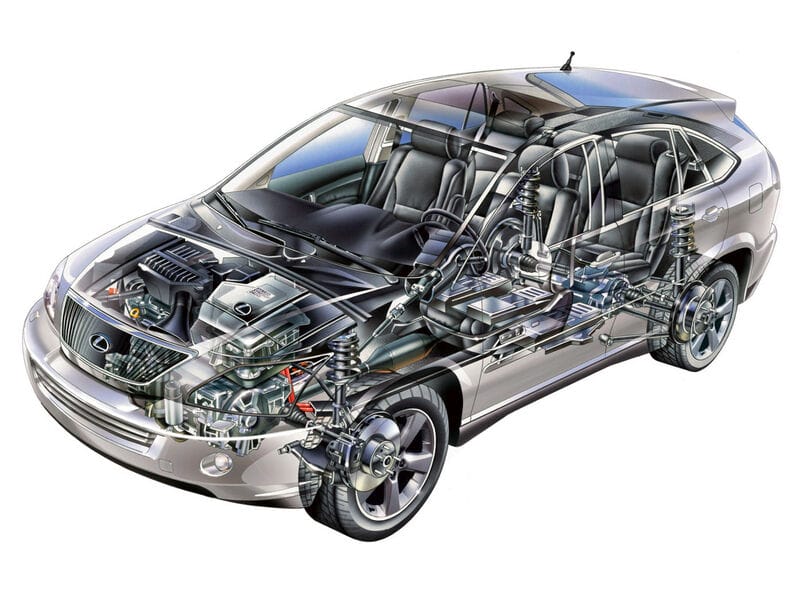
Tampoco hay árbol de transmisión en el Lexus RX 400h (híbrido 4×4)
Mediante motores eléctricos
Hasta el momento hemos visto soluciones en las que los dos ejes están conectados de forma permanente o parcial de forma mecánica, lo que implica el movimiento de piezas y gasto energético en calor y rozamiento. Mediante motores eléctricos, la fuerza motriz se envía con cables eléctricos, reduciendo mucho las pérdidas. En la imagen superior vemos el sistema de tracción total del Lexus RX 400h. En el eje delantero tiene el motor de gasolina y un motor eléctrico, y otro motor eléctrico mueve el eje trasero. No hay árbol de transmisión, lo que facilita el diseño.
Una centralita electrónica decide cuánto empuja cada uno de los motores. Es posible circular en modo 4×2 puro, mientras el motor trasero no hace nada, o circular en modo 4×4 si este último recibe corriente eléctrica. Lo mismo aplica para coches eléctricos puros, como Tesla Model S, con un motor por cada eje. También entran en este clasificación los motores de rueda, uno por cada rueda motriz, donde se puede establecer el reparto de fuerza en cada rueda de forma instantánea y con la máxima eficiencia.
Esta configuración es la más eficiente. Sin embargo, tener más motores no implica más potencia total, sobre todo en el caso de los híbridos, ya que la potencia disponible es la suma de lo que dan las baterías y un motor/generador acoplado al motor de combustión, no a todo lo que los motores pueden dar de sí a la vez.
-> Algunas denominaciones comerciales: Audi e-tron quattro, Toyota E-Four, Nissan E-4WD…

Javier Costas
Soy periodista de motor desde 2001. Trabajo para contagiar mi pasión por los automóviles tanto a los que saben como a los que no saben, con toda una vida laboral dedicada al motor.
Si no tengo un volante entre mis manos, es que estoy cerca de agarrar otro, pero siempre en movimiento.

Hola Javi, nunca había leído tu blog, me gusta, ya lo puse en mis favoritos, sin duda das mucha información, me gustó mucho! Vine por info de un BMW y me voy con un buen sitio para aprender más, gracias Javi!
Hola, Javier
Sobre el sistema de acoplamiento viscoso: hasta donde yo sé, este acoplamiento no conecta o desconecta la tracción total, sino el bloqueo entre ejes.
«En otras palabras, con este sistema la mayor parte del tiempo se conduce como un 4×2, y solo hay modo 4×4 puntualmente [el pseudo-bloqueo de diferencial se da como comentas, pero el resto del tiempo sigue siendo 4×4, solo que sin el bloqueo (diferencial abierto). Por ejemplo, los Subaru llevan acoplamiento viscoso y la tracción es 4×4 permamente]. […]Una importante desventaja es que si una rueda no tiene adherencia se quedará patinando como loca y las otras tres no recibirán par, a menos que haya un control de tracción que la frene [no exactamente: el diferencial viscoso, cuando se calienta por la diferencia de giro entre ejes, se bloquea parcialemente, lo que hace que se reparta más par a las ruedas que no patinan].»
Saludos, y gracias por tu trabajo.